
Servomotor controlled by Gyro(MPU6050) using Arduino & Transceiver - Wir...

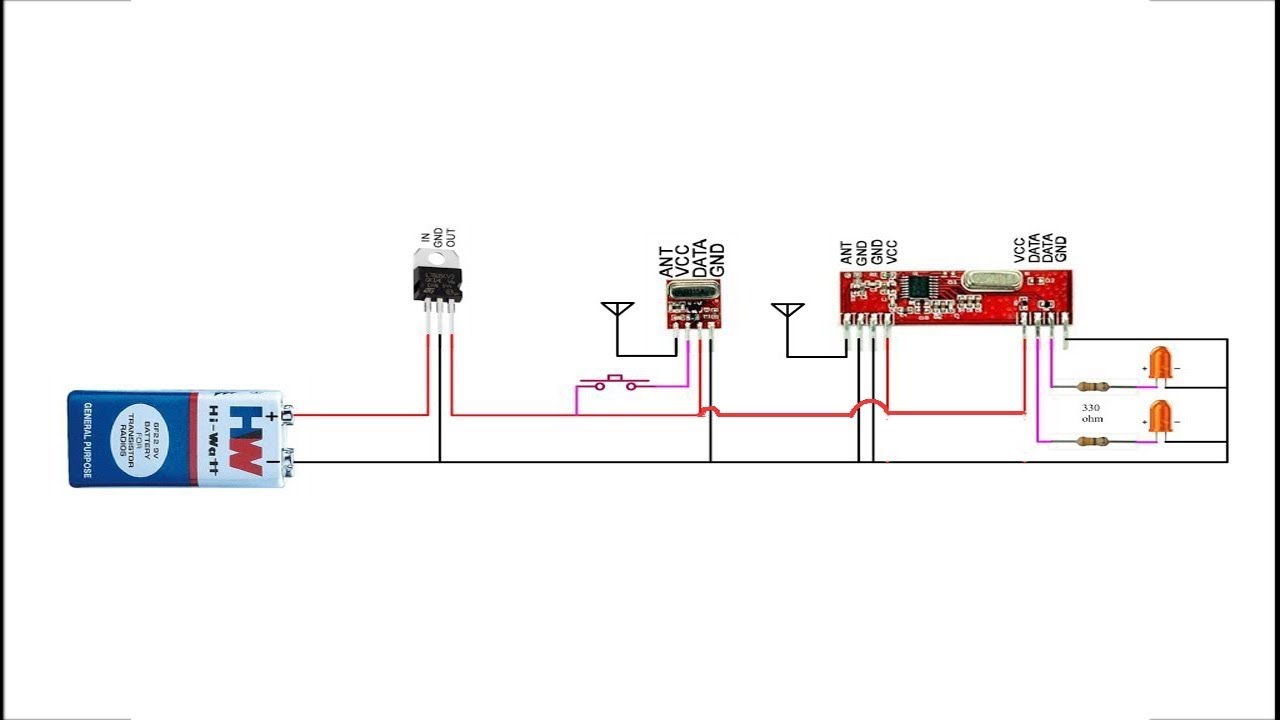
Circuit Diagram: Required Components: Arduino uno/nano - 2 Nos Battery - 2 Nos Transceiver - 2 Nos Servo Motor - 2 Nos Gyro (MPU6050) - 1 Nos Program Code: Transmitter Code: #include <SPI.h> #include "RF24.h" #include "Wire.h" #include "I2Cdev.h" #include "MPU6050.h" MPU6050 mpu; int16_t ax, ay, az; int16_t gx, gy, gz; int data[2]; RF24 radio(9,10); const uint64_t pipe = 0xE8E8F0F0E1LL; void setup(){ Wire.begin(); mpu.initialize(); Serial.begin(9600); radio.begin(); radio.openWritingPipe(pipe); } void loop(){ mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); data[0] = map(ax, 10, 17000, 2,178); data[1] = map(ay, 10, 17000, 2,178); radio.write(data,sizeof(data)); { Serial.println(data[0]); Serial.println(data[1]); } } Receiver Code: #include <Servo.h> #include <SPI.h> #include "RF24.h" Servo Servo_motor_x,Servo_motor_y; RF24 radi...


{kind=link}
Wrong circuit daigram. In the receiver module VCC is connected to ground instead of 5v bettery.
ReplyDelete